-01.jpg)
Urban Flow Toolkit


The Urban Flow Toolkit is a modular pneumatic actuation system that is controlled via Grasshopper and its plugin Firefly, which enables a USB-based connection to Arduino microcontrollers. Consisting of various signaling, power, and air delivery components, this system allows the user to blow air at different pressures, intervals, and locations in order to create a distinct pattern of air pressure-driven movement. This kit was purposed for the actuation of silicone soft robot prototypes in dynamic building envelope research undertaken by the Urban Flow architecture studio and the Dynamic Assemblies Lab.

Workflow of the Urban Flow studio
The pneumatic kit was utilized under the 'Demonstrate' workflow step of the Urban Flow architecture studio, following the students' modeling, simulation, and fabrication of biologically-inspired soft robot prototypes ranging in shape from bumps, apertures, and scales. I gave the students workshops on the simulation of the digital models in Kangaroo and assisted with 3D printing of the molds used to create their soft robots. Students connected their silicone robot to the kit's air delivery system and programmed the actuation via the Grasshopper tool I developed.

The design of the pneumatic kit was heavily based on the open-source Soft Robotics Toolkit platform, the brainchild of the Harvard Biodesign Lab. The Soft Robotics Toolkit provides helpful tips and links for the design of fluid delivery systems. I modified the design as necessary to fit the application at hand.
Example fluidic control kit from the Soft Robotic Toolkit
Image: Soft Robotics Toolkit
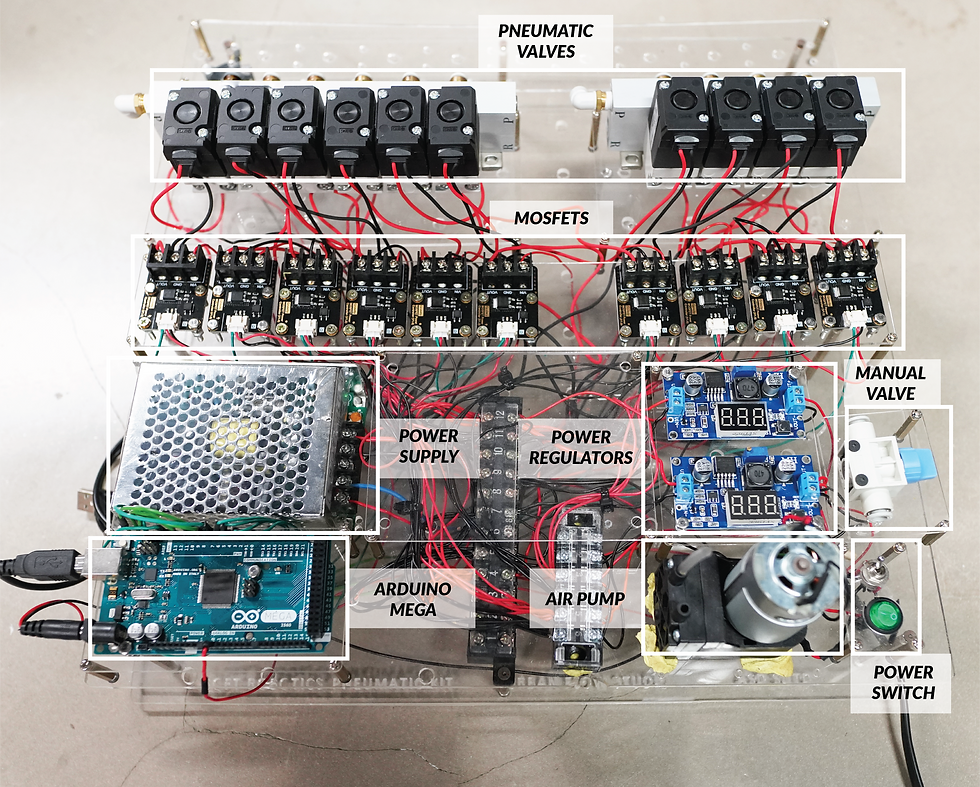
The pneumatic kit consists of 10 air flow sensors, two manifolds for a total of 10 pneumatic valves, 10 MOSFETs, one 24V DC power supply, two power regulators (12V and 5V), one manual valve, one Arduino Mega, two screw terminals, and one air pump (but also can be connected to any other air delivery system within the valve's limits) . The base and platforms were lasercut from acrylic sheets with holes for assembly with nuts and bolts.
![Kit Drawing [Converted].jpg](https://static.wixstatic.com/media/5c1d64_2df75bbd30ac479689a98b8114f4c563~mv2.jpg/v1/fill/w_343,h_342,al_c,q_80,usm_0.66_1.00_0.01,enc_avif,quality_auto/Kit%20Drawing%20%5BConverted%5D.jpg)
Lasercut file for the base and component platforms

The associated Grasshopper tool allowed the user to program custom air actuation protocols for their soft robots and change them in real time via automated writing to the Arduino Mega microcontroller using the tools provided by Firefly. The Firefly components accept integer and floating number inputs and send them to the corresponding digital pins on the Arduino board. This afforded students a plug-and-play, familiar interface to prototype their soft robots' movement without having to constantly load Arduino code.
Sample of the Grasshopper tool for controlling the actuation system


Wiring schematic for the toolkit